Soft Robot: Online User Study
Breathing Exercises & Design Features
Our early prototypes have established proof of concept for the bio-electrical control systems and been used to test different inflation patterns. We are working to develop a larger more refined prototype. To guide our process, we developed an online study to test the effectiveness of the prototype at leading relaxing guided breathing exercises for stress reduction. We also collected feedback on design preferences with a questionnaire with a series of renderings and gifs that depicted the pheB surface embedded in the wall of a small, confined space, and asked respondents to rate their preferences for different design features including: color, size, scale, edge complexity, and orientation.
Full paper can be read here:
Breathing Exercises led by pheB for Relaxation
We evaluated: (1) if the robot surface was effective at leading guided breathing exercises to reduce self-reported stress; (2) whether there were differences in user perceptions between different visualization conditions for guided breathing exercises: a 2D animation and a video of the pheB prototype; (3) whether the tangible quality of pheB increased perceptions of co-embodied breathing and biophilic sensibility.
(1) The results of the study showed that pheB was perceived as an effective guide when leading breathing exercises, both through rating scales and the observed and predicted reduction in self-reported stress.
(2) There was no strong consensus in favor of the pheB prototype over the 2D animation. The model of Likert scale ratings by visualization conditions showed crossover interaction effects on Pace, Relaxing, and Effective, suggesting people had strong feelings in support of the visualization modality they preferred and rated the other visualization significantly lower.
(3) One area of strong consensus was in perceptions of Co-embodied Breathing; pheB was rated higher than the 2D graphic by both vis preference groups.
Design Features to test perceptions of pheB in a Spatial Environment
Participants were asked to assign a series of gifs depicting pheB in different colorways into three categories: 1) exciting; 2) relaxing; and 3) neutral. Six hues were used to cover the whole range of the spectrum (i.e., red, orange, yellow, green, blue, and purple)




We used the animated images of design alternatives to investigate which were more likely to be accepted by humans in real-world interactions. Participants were asked their preference when presented with three possible design options.
(1) Scale of the air chambers shown at small, medium, and large scale.



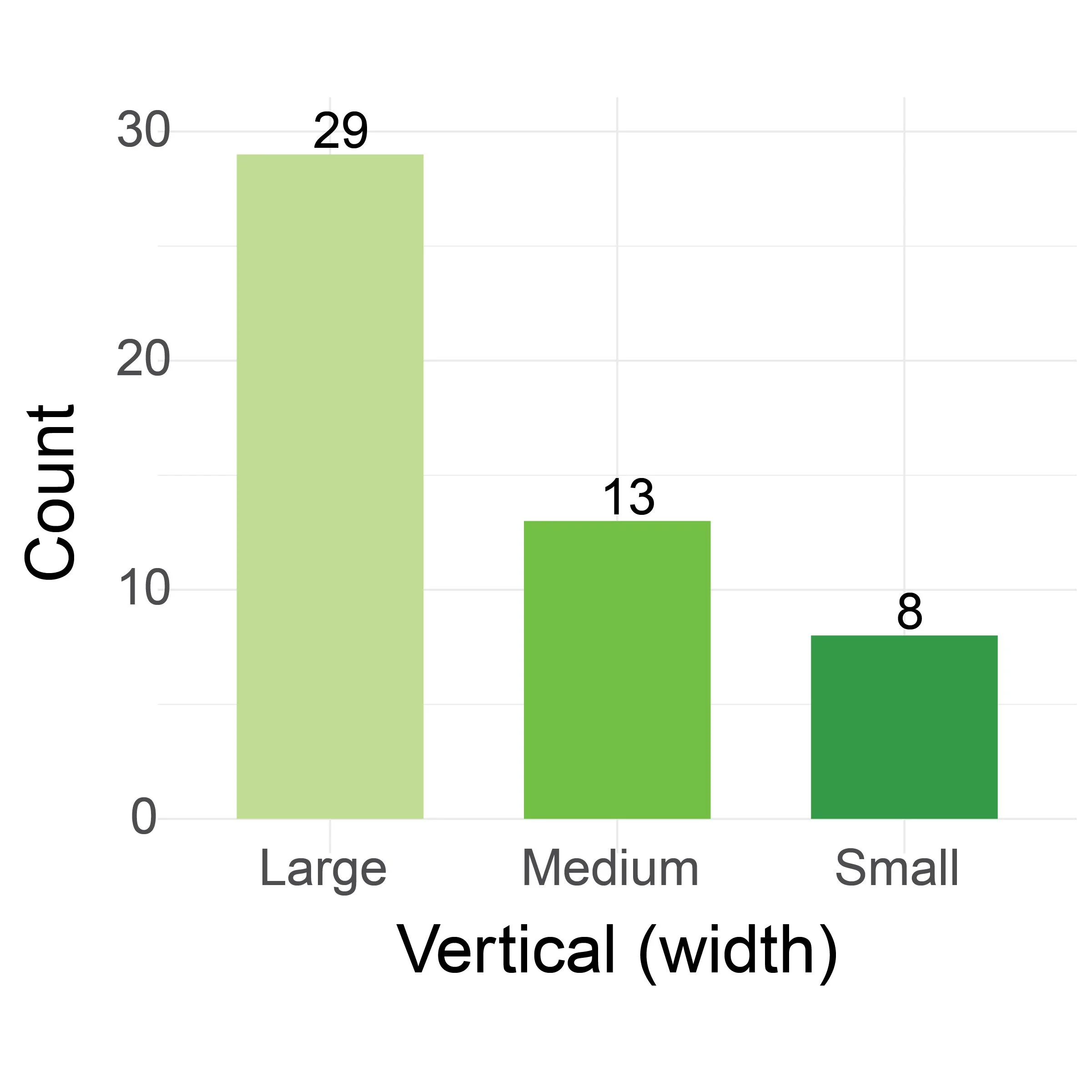
(2) Vertical orientation shown in small, medium, and large widths.



(3) Horizontal orientation shown in small, medium, and large widths.




(4) Complexity of the edge profile shown with least, medium, and most complexity.




For features related to scale, orientation, and complexity, it was noteworthy that the largest option with the least complexity was consistently preferred most, informing us that people would accept larger areas of pheB but perhaps with less complexity in a confined space.
To better understand how to design soothing biophilic behaviors, we asked respondents to rank-order video recordings of natural phenomena.
Four gifs were presented in random order: (1) calming ocean surface waves, (2) rainfall hitting the ground, (3) clouds moving across the sky, and (4) leaves in the wind.





Rankings of the natural phenomena gifs showed that no clear pattern of consensus emerged from the data, suggesting that preferences were highly subjective from person to person.