A Walk in Nature
Exploring the Creative Potentials of a Generative Design Tool for Soft Robotic Surfaces that Foster a Connection with Nature.
This work explores how biophilic design (based on the theory that humans have an evolutionary desire to connect with nature) can be applied to interactive systems. We describe a generative design tool that produces a bio-inspired digital prototype of a soft robotic surface. In our workflow, participants walked outdoors to photograph natural features in their environment. The photographs are used to generate a set of corresponding designs. As early validation, we conducted a small user study to test the robustness of our tool with different photographic inputs. We also collected feedback on how the workflow influenced participants’ perceptions of the design outcomes. The results guided the fabrication of a new physical prototype and demonstrated the utility of our approach, which aims to inform the design of future biophilic cyber-physical systems.
Full paper can be read here:
This work explores how soft robotic systems, which have an organic quality, can be used to evoke experiences that remind us of nature. Previous user studies on the system have found that soft robots can cause experiences of discomfort or an ‘uncanny valley’ like effect, due to the synthetic materiality and movement of the surfaces, which appears to be lifelike, but not quite natural. To address these reactions, we explore how participation in the creative process through a computer-aided design (CAD) workflow might promote positive feelings and a sense of attachment to soft robotic surfaces and ameliorate negative perceptions.
Current rectangular prototype of A soft robotic surface panel

We explore how we might increase positive perceptions of the system through designs that exemplify principles of biophilic design, a strategy informed by the theory of Biophilia to provide connection to the natural within the built environment. This is pertinent, as research suggests soft robots that are perceived as more natural are preferred.
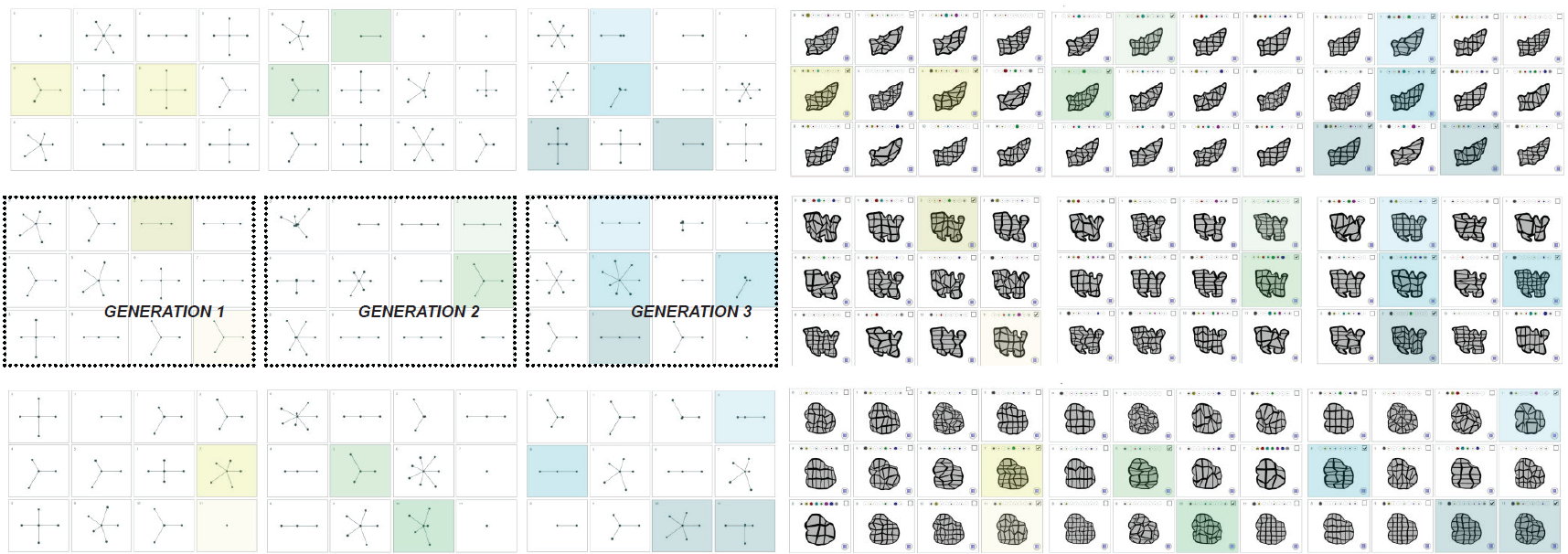
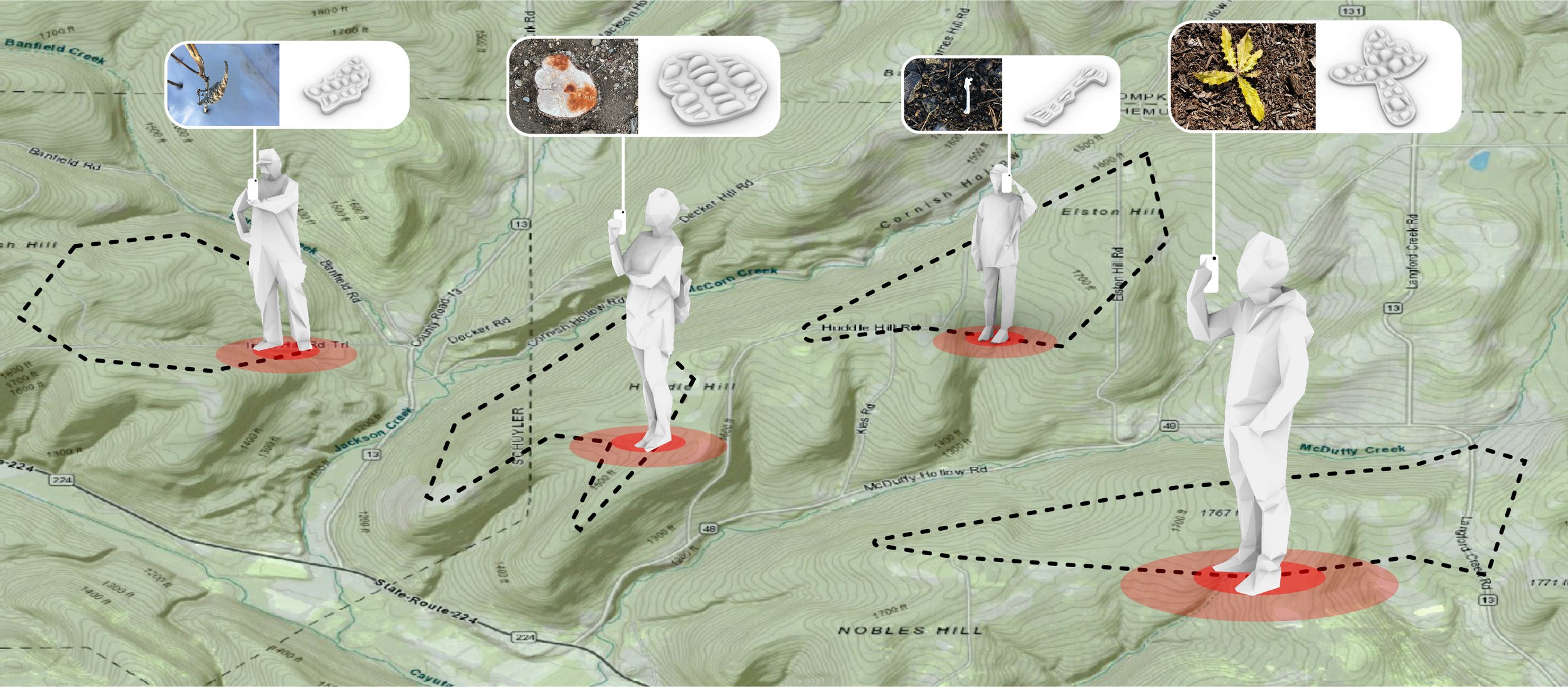
Our generative design tool enables people without CAD skills to guide the design of a bio-inspired soft robotic surface. In the proposed workflow, people take photographs of nature to identify interesting shapes. The images are used to automatically generate a set of personalized designs for a “digital prototype” of a soft robotic surface.