




















Nurturing Emergent Synthetic Life
DIRECTOR : Nicole Koltick ENGINEER : Mike Hogan
PRINCIPAL DESIGN & FABRICATION : Elena Sabinson & Jay Hardman
The field of artificial intelligence and socially interactive robotics has been dictated by pragmatic investigations concerned predominantly with consumerism and function. The resultant technological products favor human centered systems and ideologies. As these intelligent autonomous systems continue to develop, there has been a growing interest in examining the more abstract abilities of their behavior. Questions surrounding the conceptual qualities of their existence offers the need to begin developing new models of mutually beneficial relationships between humans and technology.
This approach operates at the boundaries of computers science, engineering, and design research, but also incorporates philosophical and psychological perspectives to explore novel interactions with cyber-physical agents. This project seeks to shift the perception away from our own human experience. Instead the focus is on robotic agency, non human aesthetics and the exploration of a social and ecological frontier vastly different from our own.
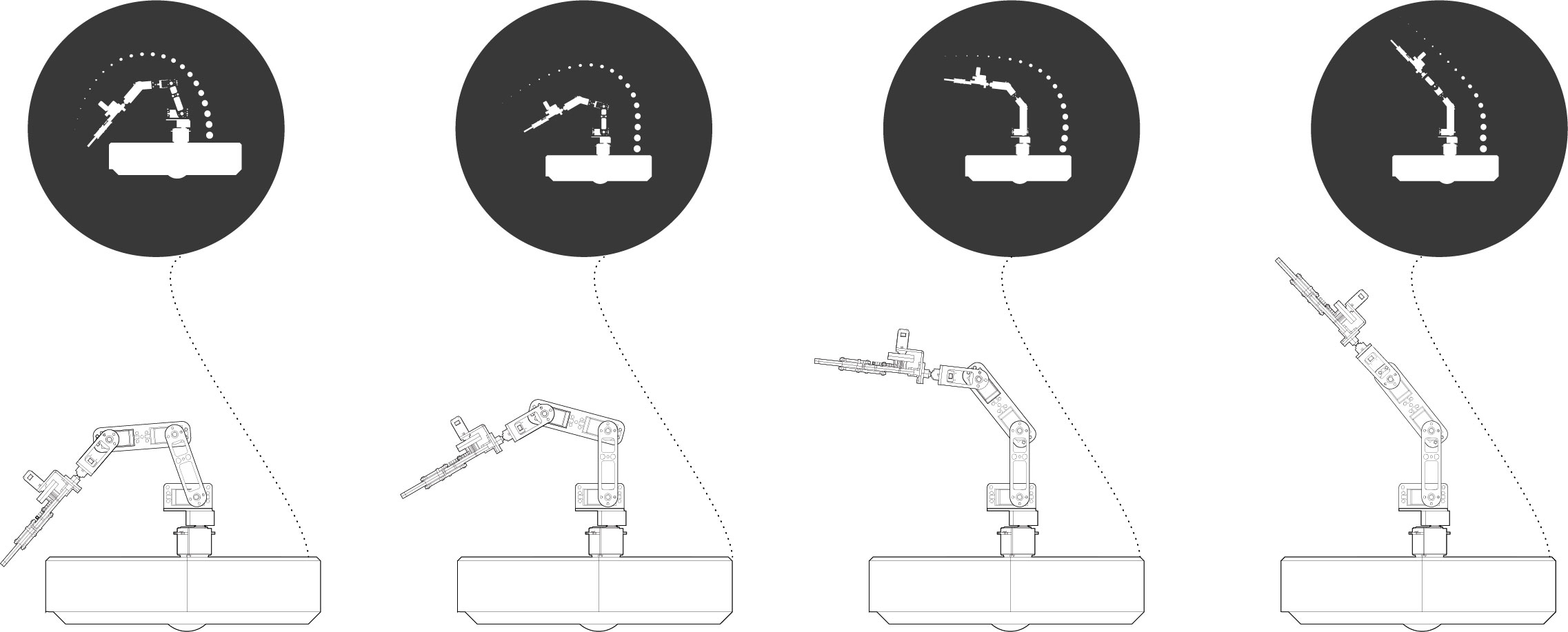
This project also focuses on new forms of programming which utilize the impact of simultaneous motion between a human programmer and robotic receiver. This synchronized collaboration provides a direct way of interfacing with artificial agents. We created an analog control system which records and digitizes fluid motions in real-time. This analog control arm is equipped with sensors to interpret our movements which are translated into a digital language the robot understands and re-enacts. These recordings will make up a library of naturalistic gestures that can be continually performed. We have discovered this system of programming allows for an experience which is tangible, thereby increasing the empathetic response the user feels towards the robot. The robots will be able to interact naturally with humans, as well as its landscape, through digital cameras enriched with facial recognition capabilities. These enhancements enable virtual embodiment and new interaction scenarios for humans and robots in the habitat.
What if a robot had a hobby?
Should we empathize with non-biological species?
Robot Vision is captured through a camera. The environment is detected through infrared sensors.
An interactive controller is used to record actions in order to create a gesture library of codeveloped robot human behavior. This intuitive form of programming encourages connection between the robot and the programmer.
SPECULATIVE INTERACTIONS
How can we translate a robot's perception?
Robot Vision: Embodiment Gallery
Full Scale Installation
Schematic Project Drawings
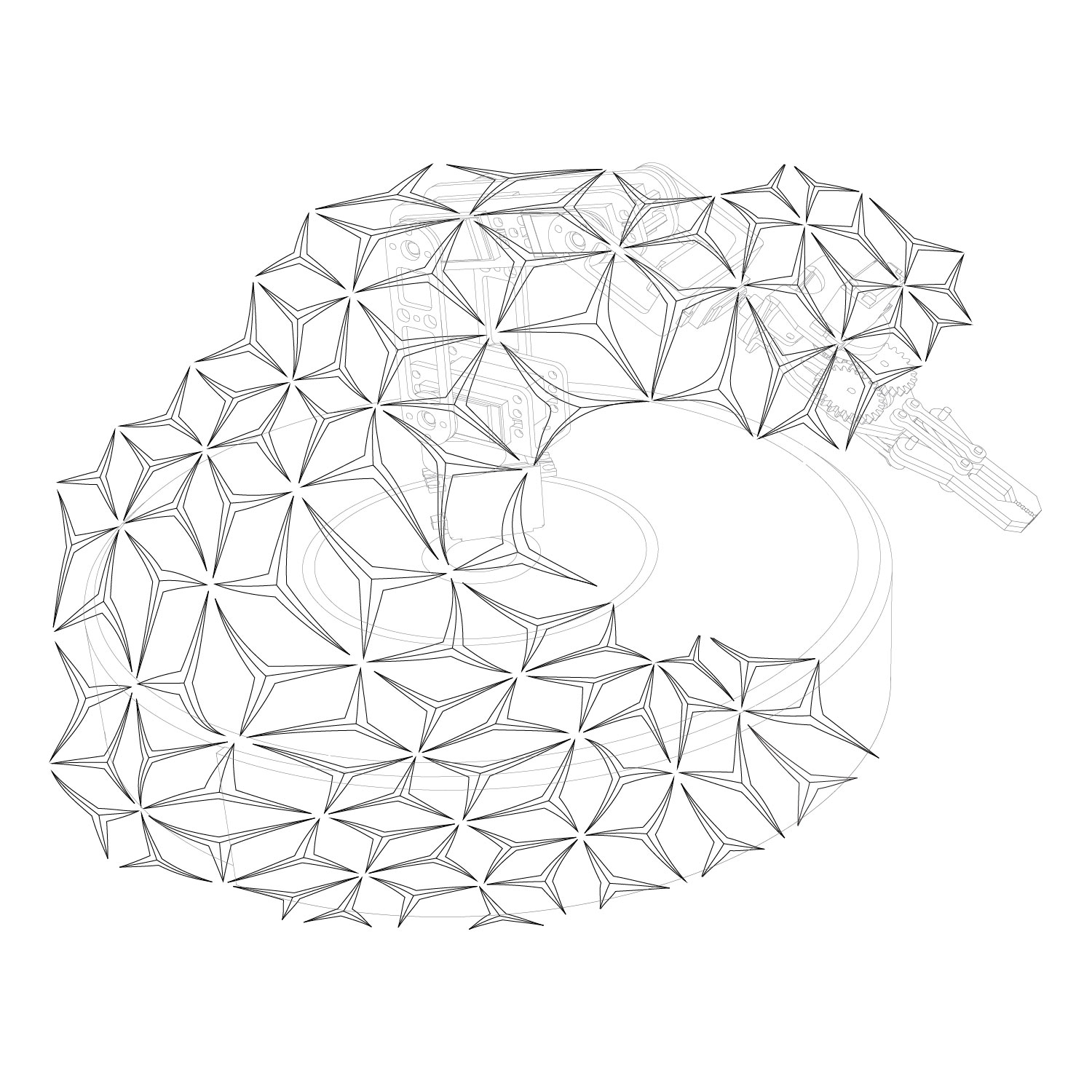
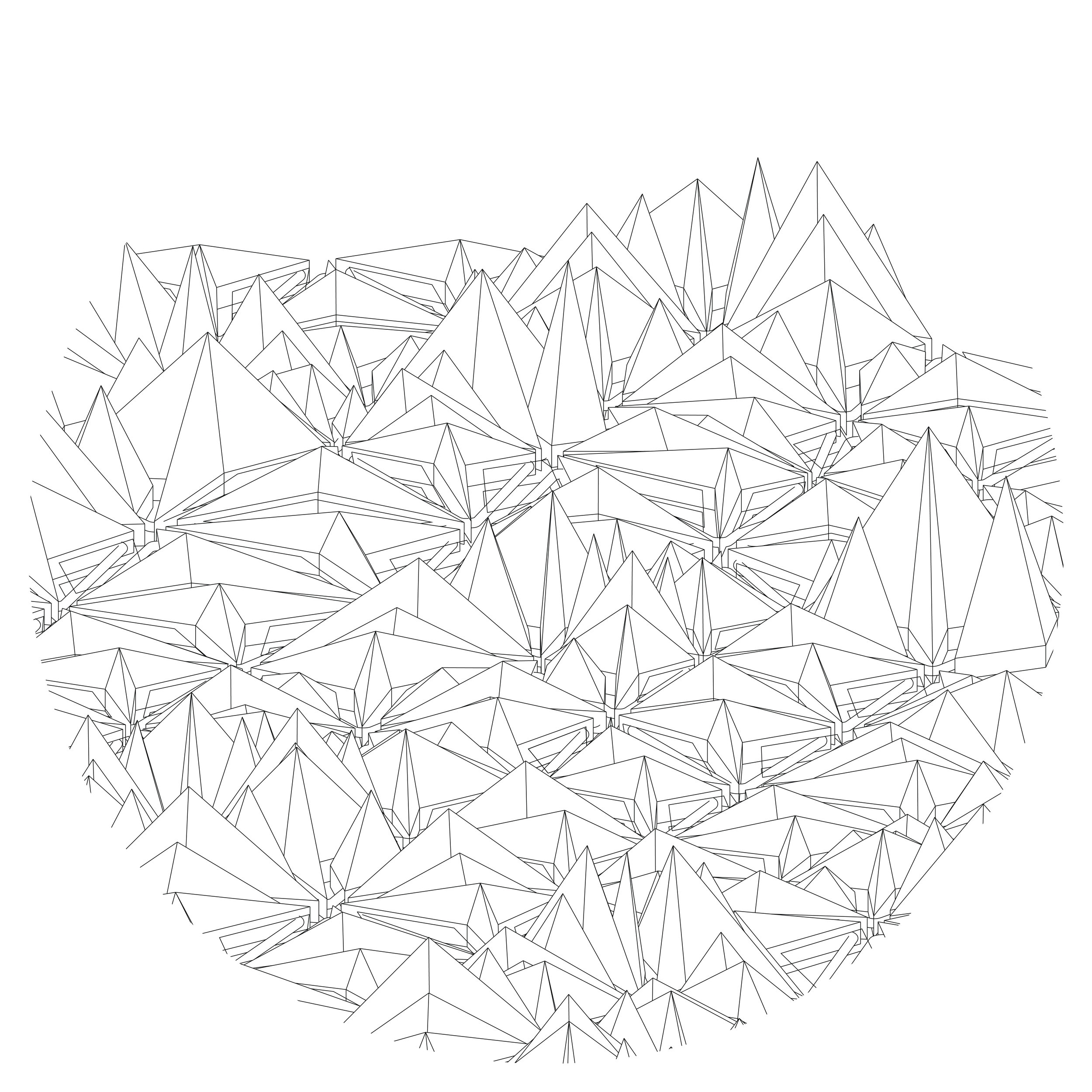
Robot Skin
3D printed variable chainlink
A 3D printed flexible skin made of interlocking pieces printed in sheets. The patterns shifts in scale across all three axes. The changes in its shape are based on the requirements of the robot's mobility.
RHINO, Paneling Tools, Grasshopper
Control pattern and parametric manipulation.